Submarine "Sampi"
(name is a subject to change)

The Project
This is a work in progress project I believe I started sometime around 2023. I'm quite fascinated by WW1-WW2 era submarines and having spent a lot of time building historical ones, I've concluded that it is always nicer building fictional vehicles that are actually designed around Brickadians and you're not restricted by having to stick to a scale at the cost of some details not looking quite as good as they would, were they a bit different size. Having previously built the type VII-C U-boat and the Finnish submarine Vesikko (the two submarines with most comprehensive and readily available references online & for me, making them actually buildable), I figured if I'm going to make a fictional one, it'd be a combination of sort borrowing elements from both of those.
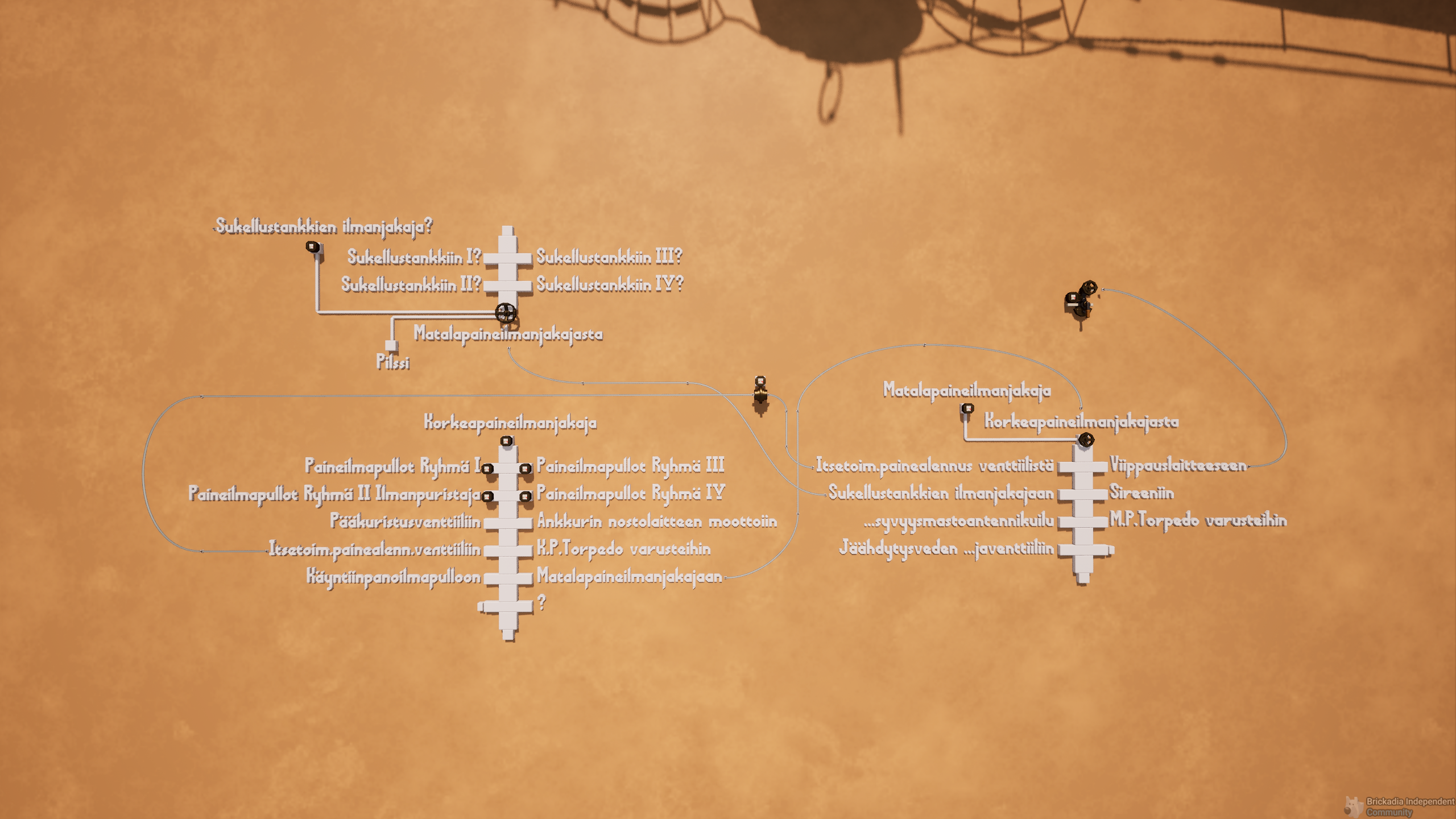
I started the whole build with the future in mind in the sense that I've tried building the submarine from the ground up in preparation for Brickadia EA. Since the EA launch, I've indeed been busy working on adding functionality to the onboard systems and controls, rather than building. The boat and buoyancy physics were a pleasant surprise and indeed making the submarine work as a submarine was relatively straightforward. It has a rudder that turns the boat and ballast tanks that drag it under the surface when flooded or push it to the surface when blown. Nearly all control related instruments are functional, including depth gauges and Papenberg and the submarine can already be controlled by a crew, though still quite simplified. For now the boat is completely lacking manual engine management and a fully detailed high pressure air system, not to mention everything related to torpedos.
Brickadia itself still has some shortcomings that are preventing me from making the Submarine work quite as it should, the main issues currently being:
- The lack of the ability to remove water from the interior, need I say more
- Water drive force is always horizontal, so changing the boat's pitch has no effect what so ever on its underwater movement and I've had to for now simulate the dive planes by using weights (not ideal) – depth can currently only be adjusted by weight
- No custom camera functionality to make periscopes actually usable
- Cannot read grid position or rotation, so I cannot make (actually smooth) compasses or inclinometers, the former being the main shortcoming instruments wise, as having no compass makes underwater navigation practically impossible
Screenshots & videos



The space under the deck is fully detailed as well (wooden deck removed for the screenshot)

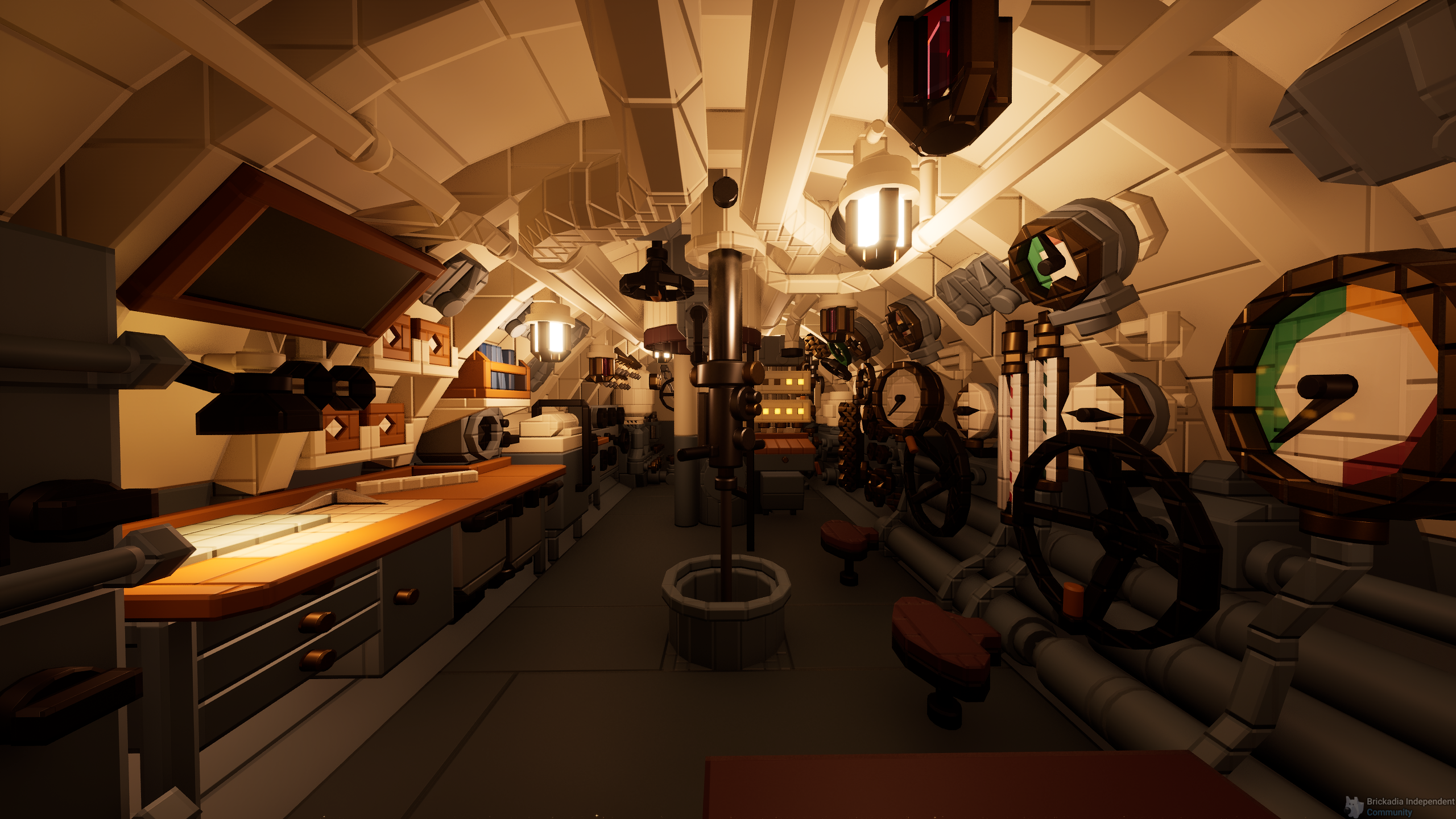
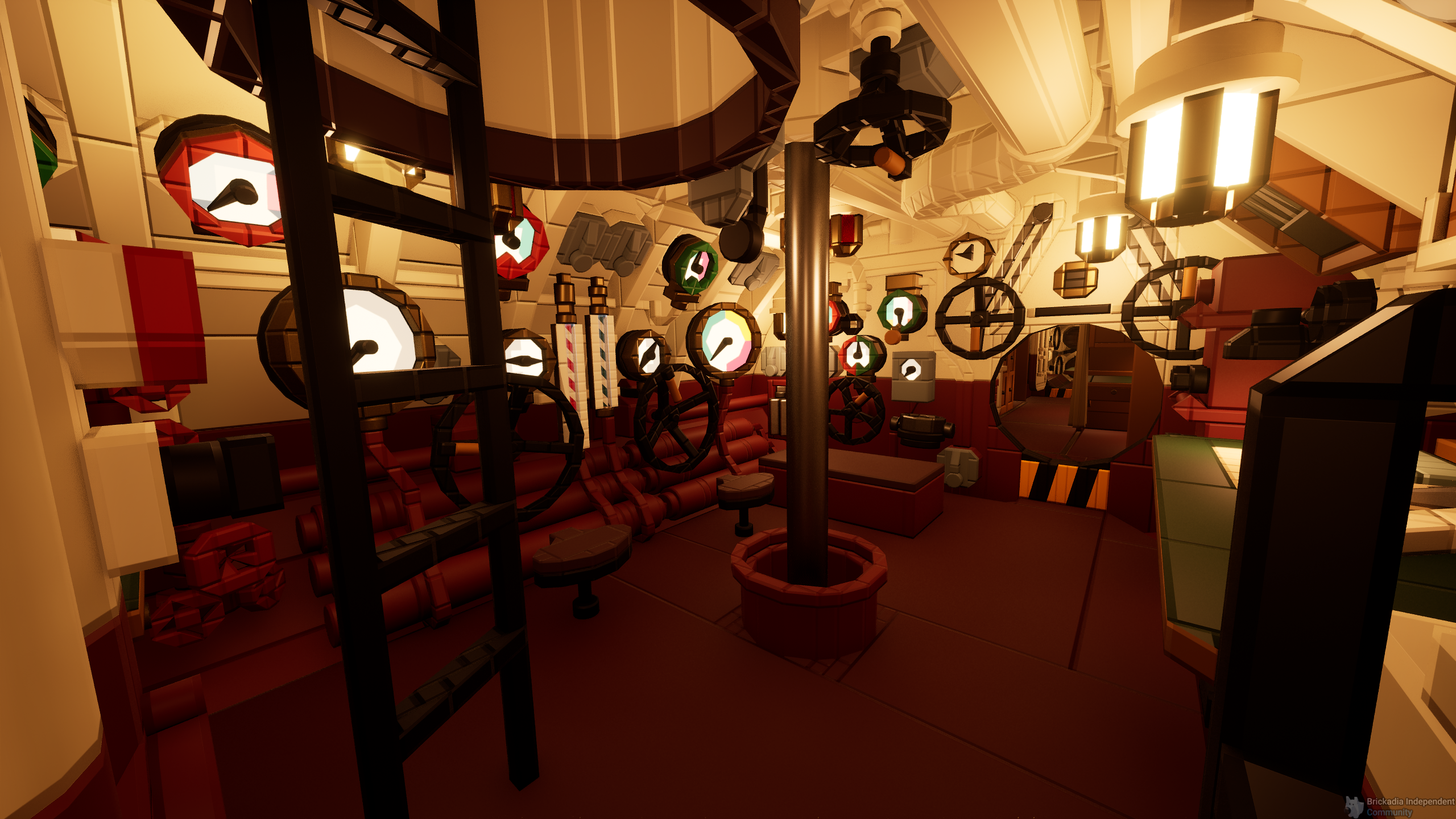
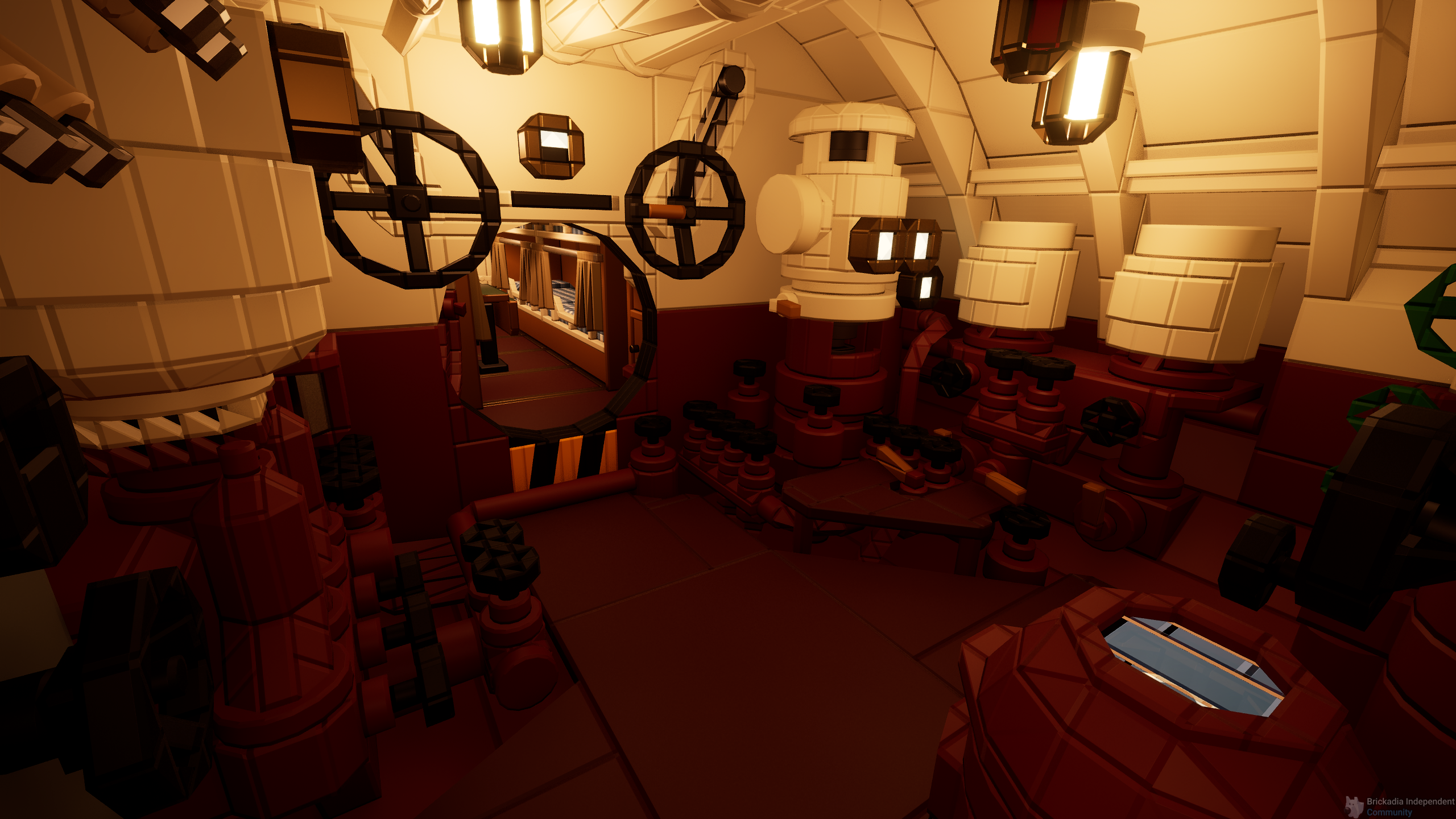
Control room

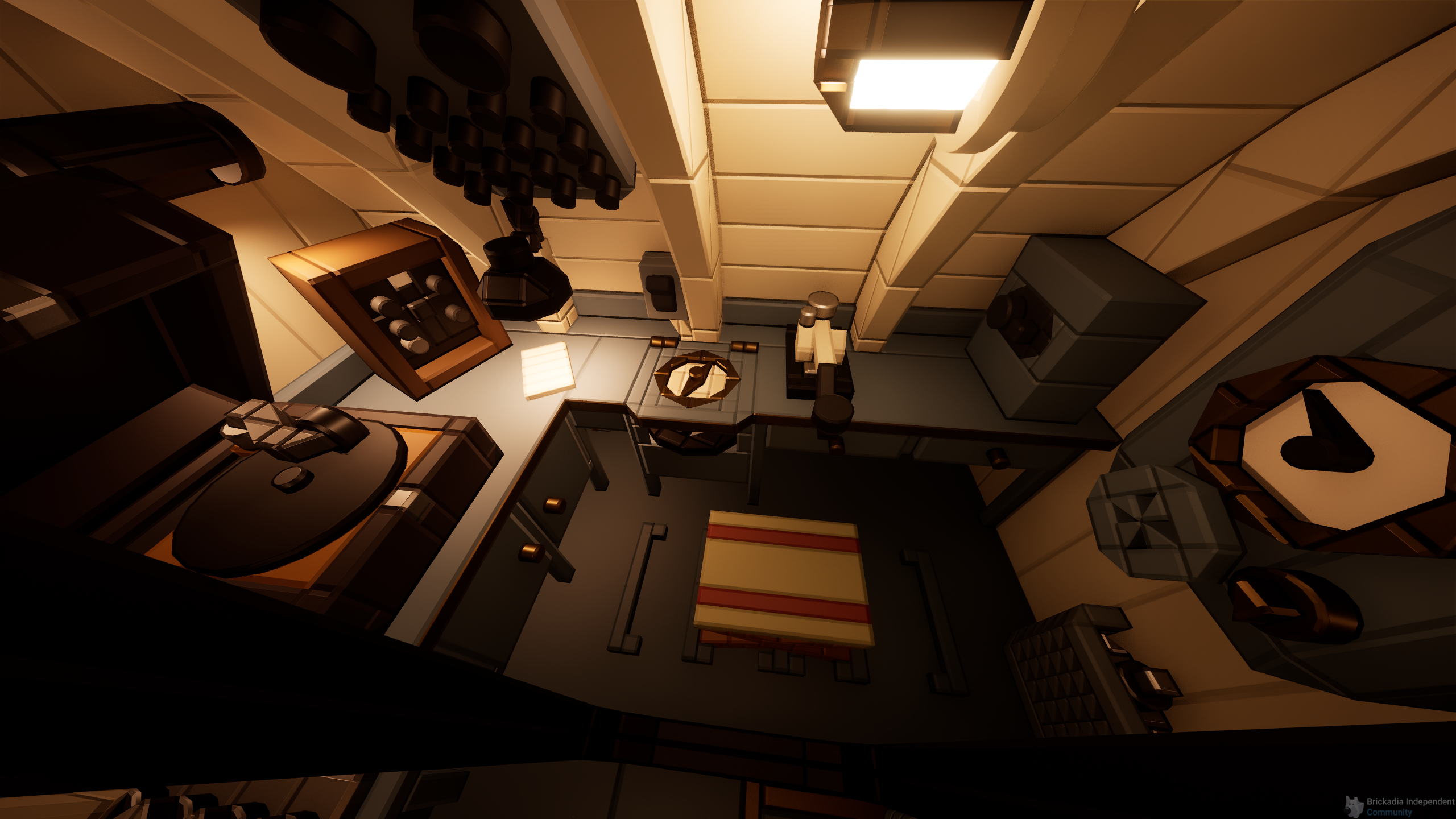
Radio & listening room

Captain's quarters and control room entrance

Officer mess


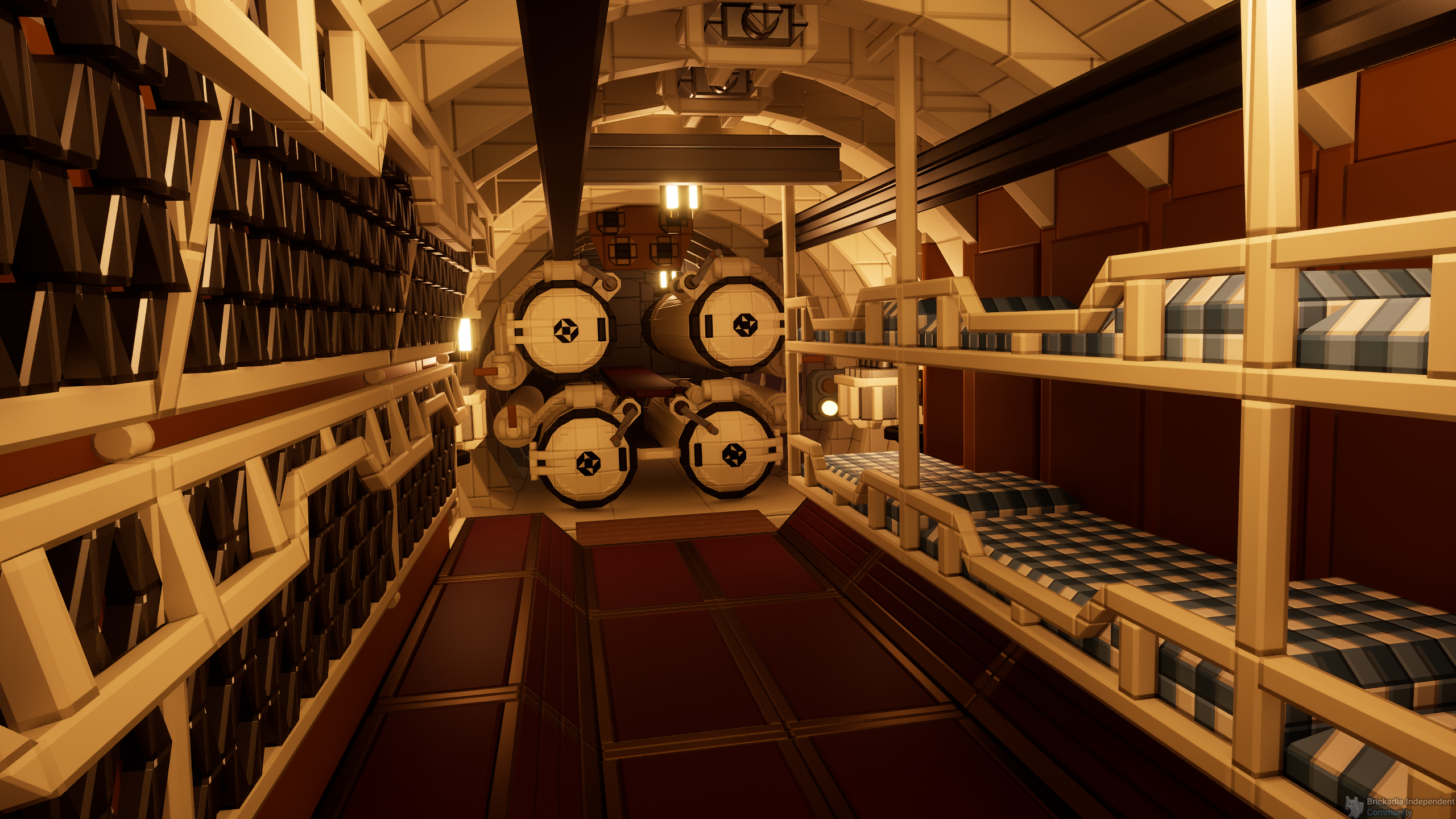
Forward torpedo room
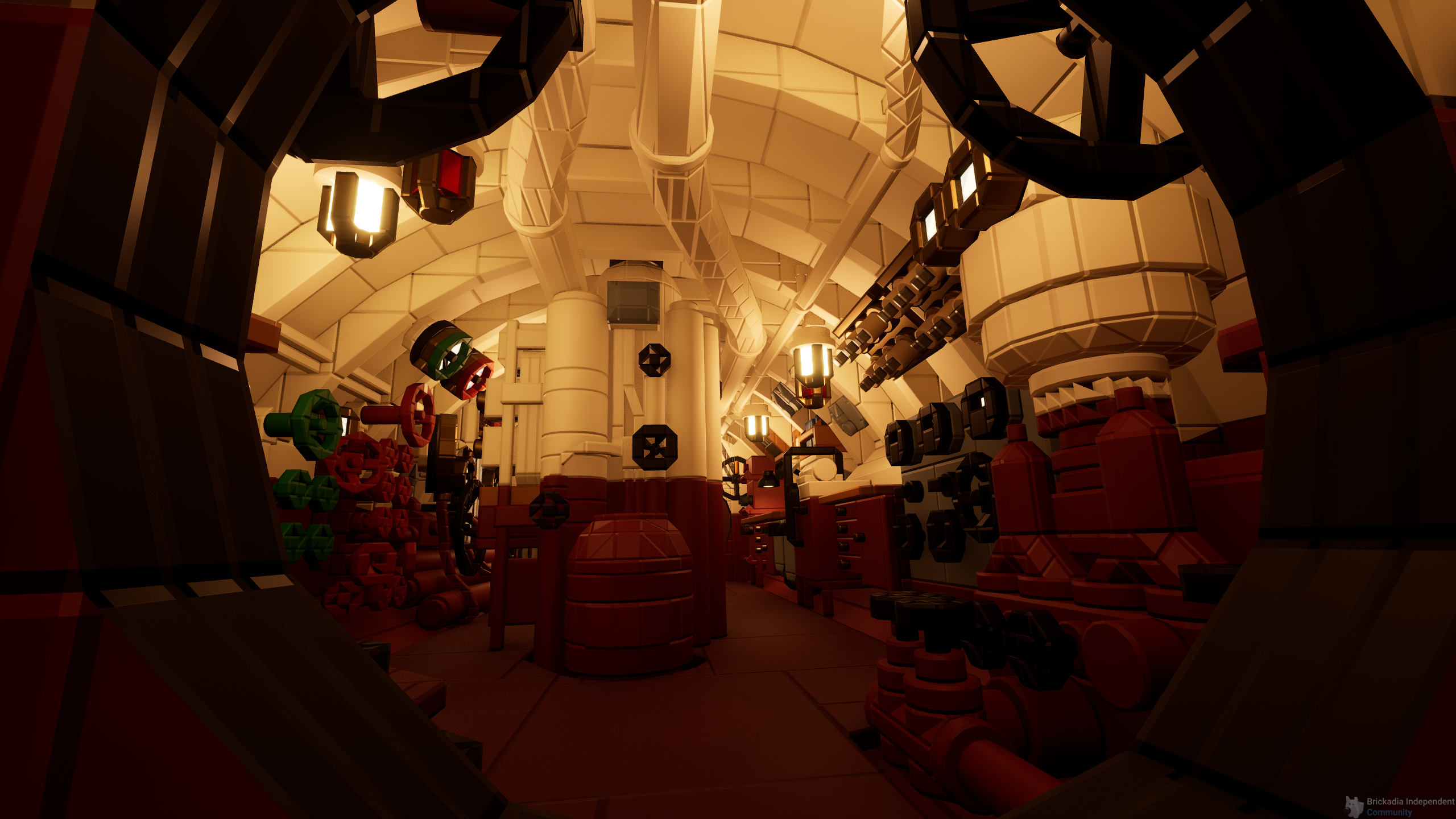
Galley and petty officer quarters (control room ahead)

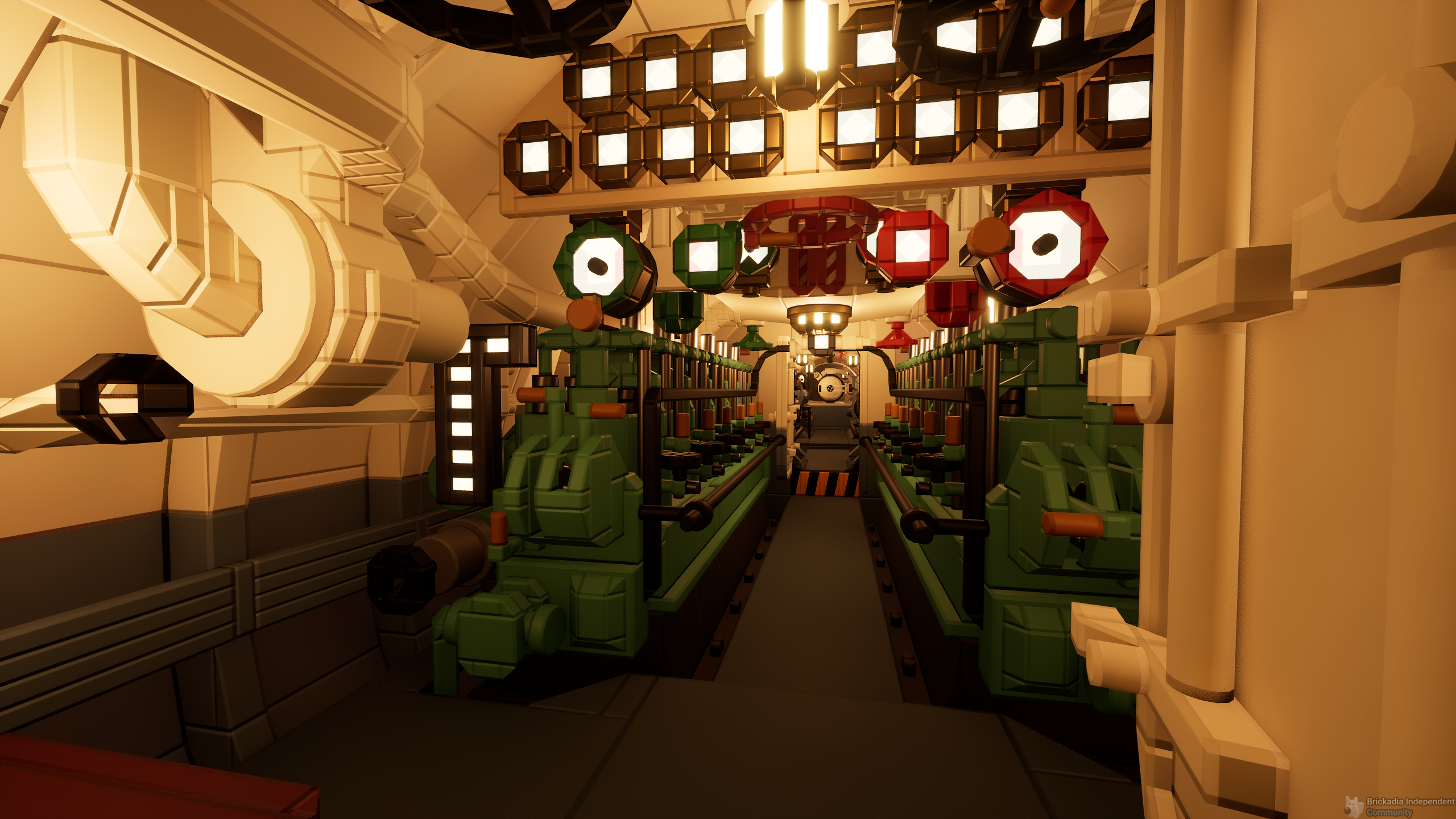
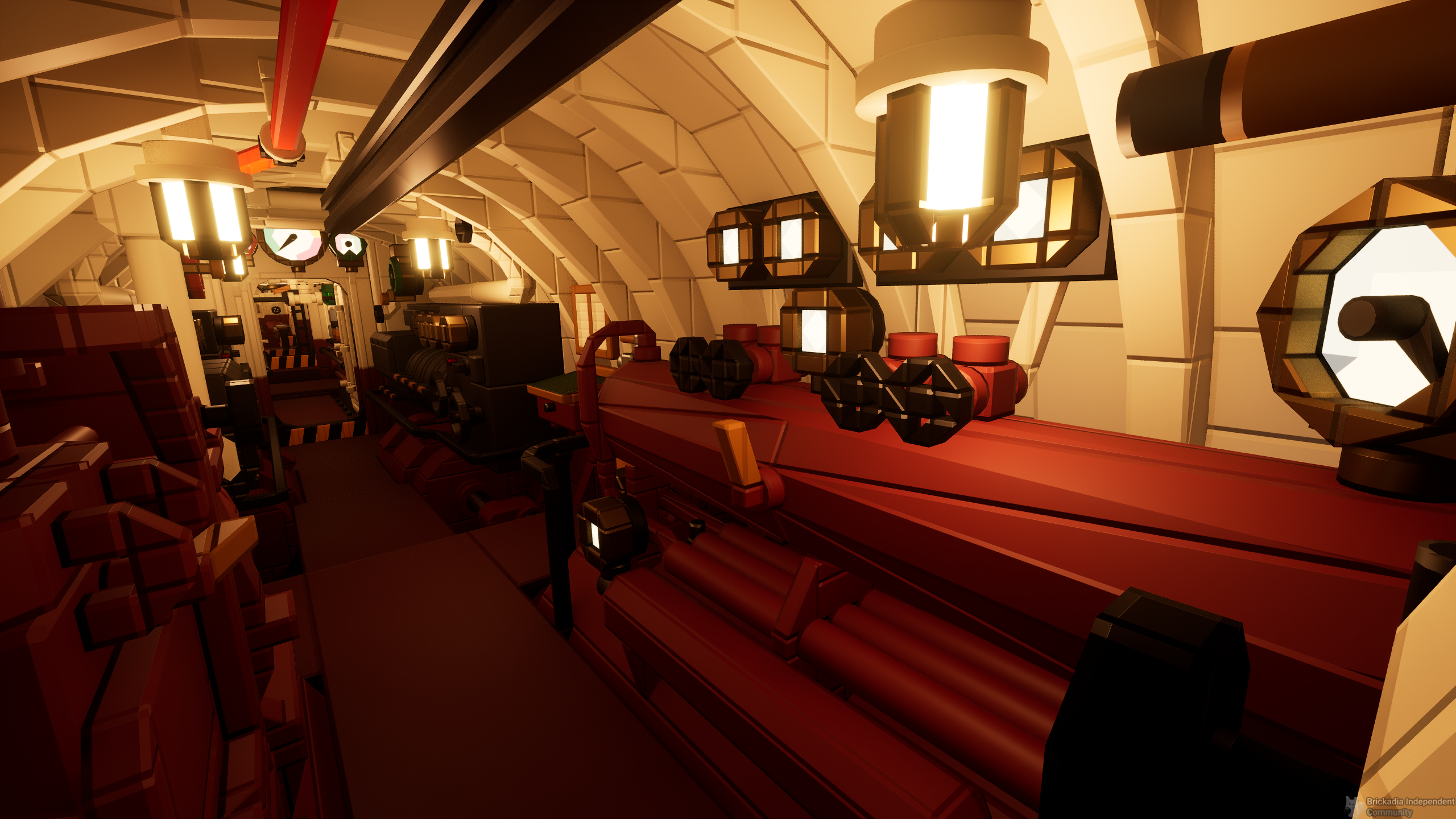
Galley and diesel engine room

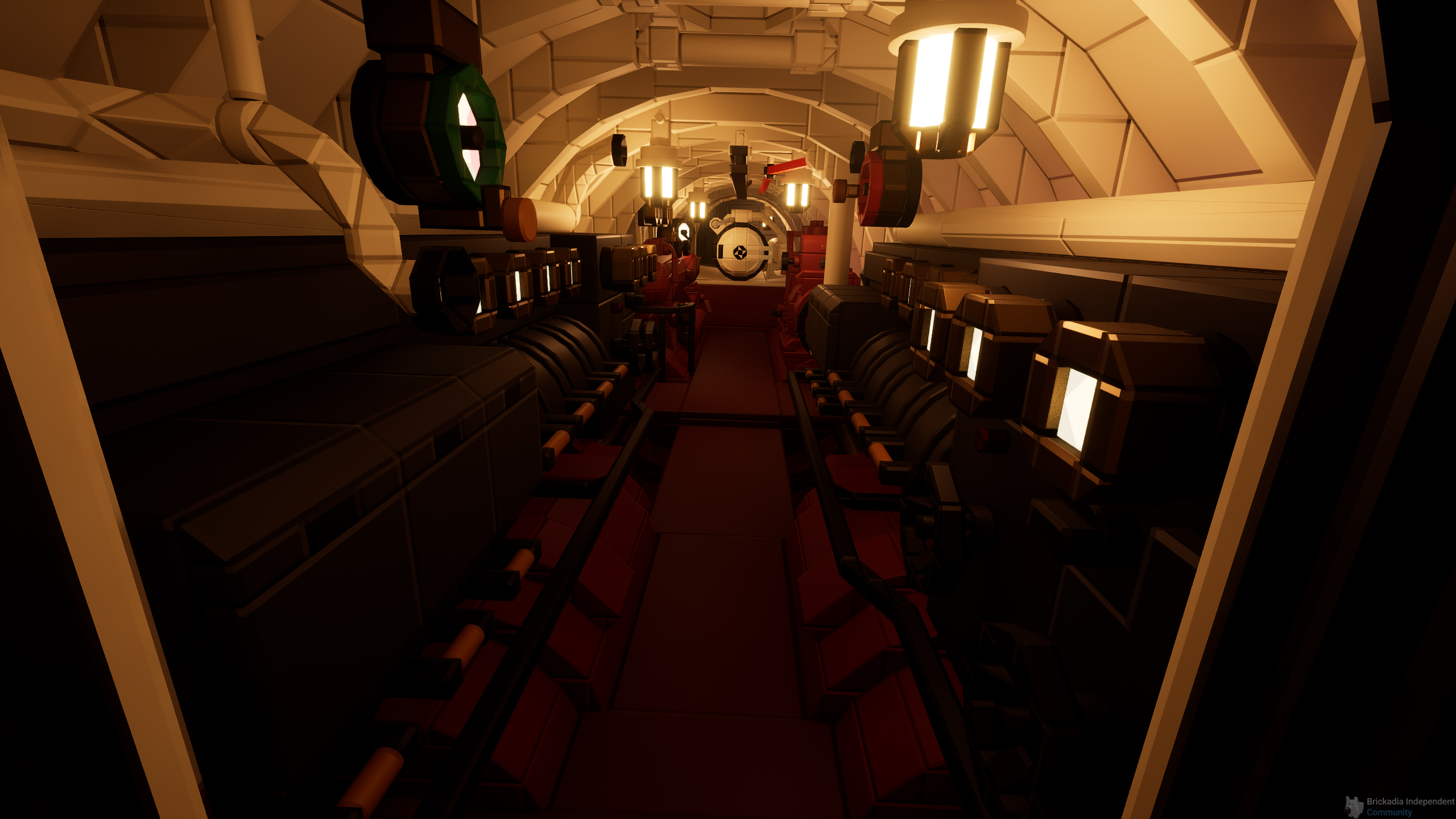
Diesel engines


Aft torpedo & electric motor room
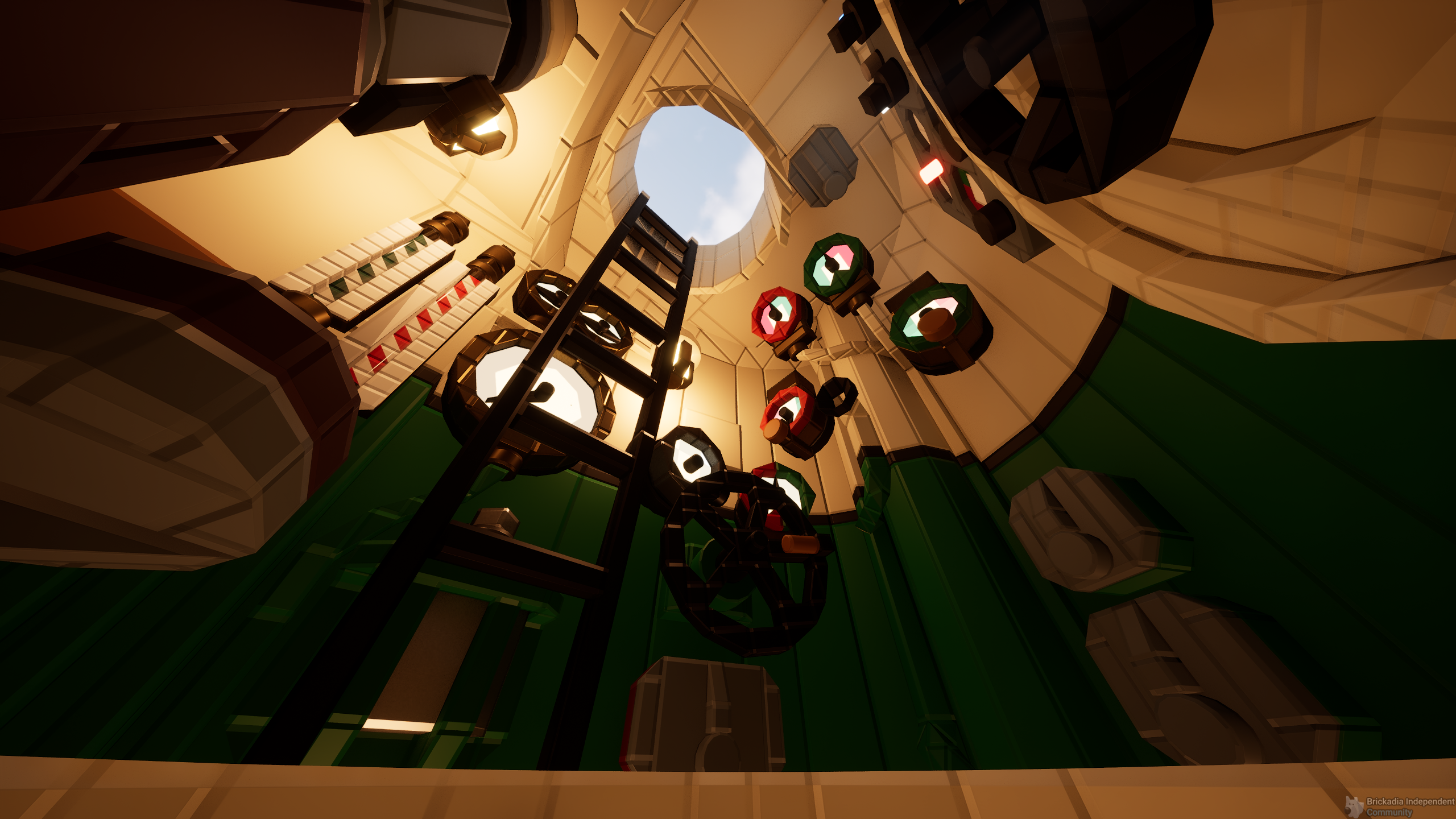
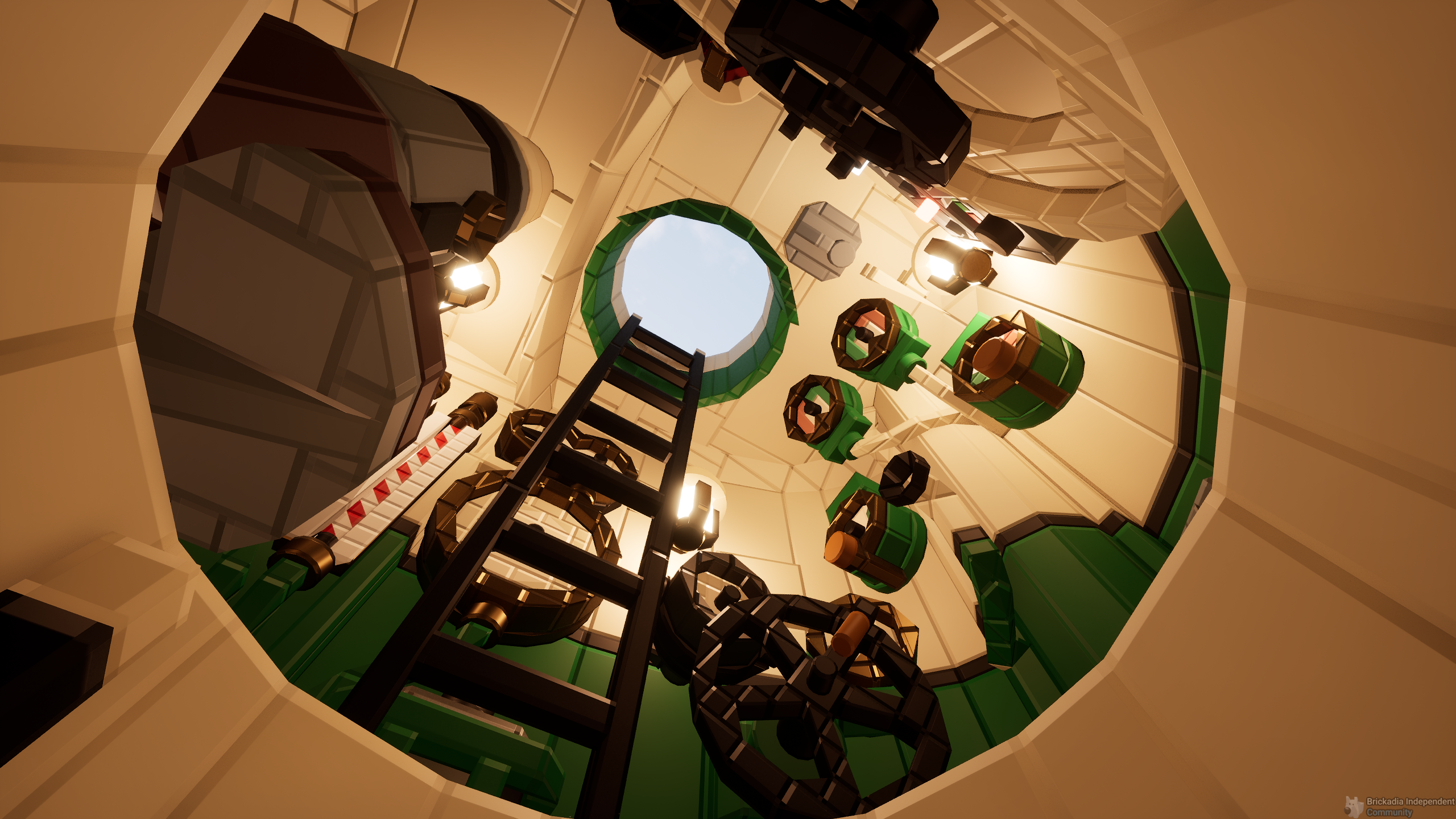
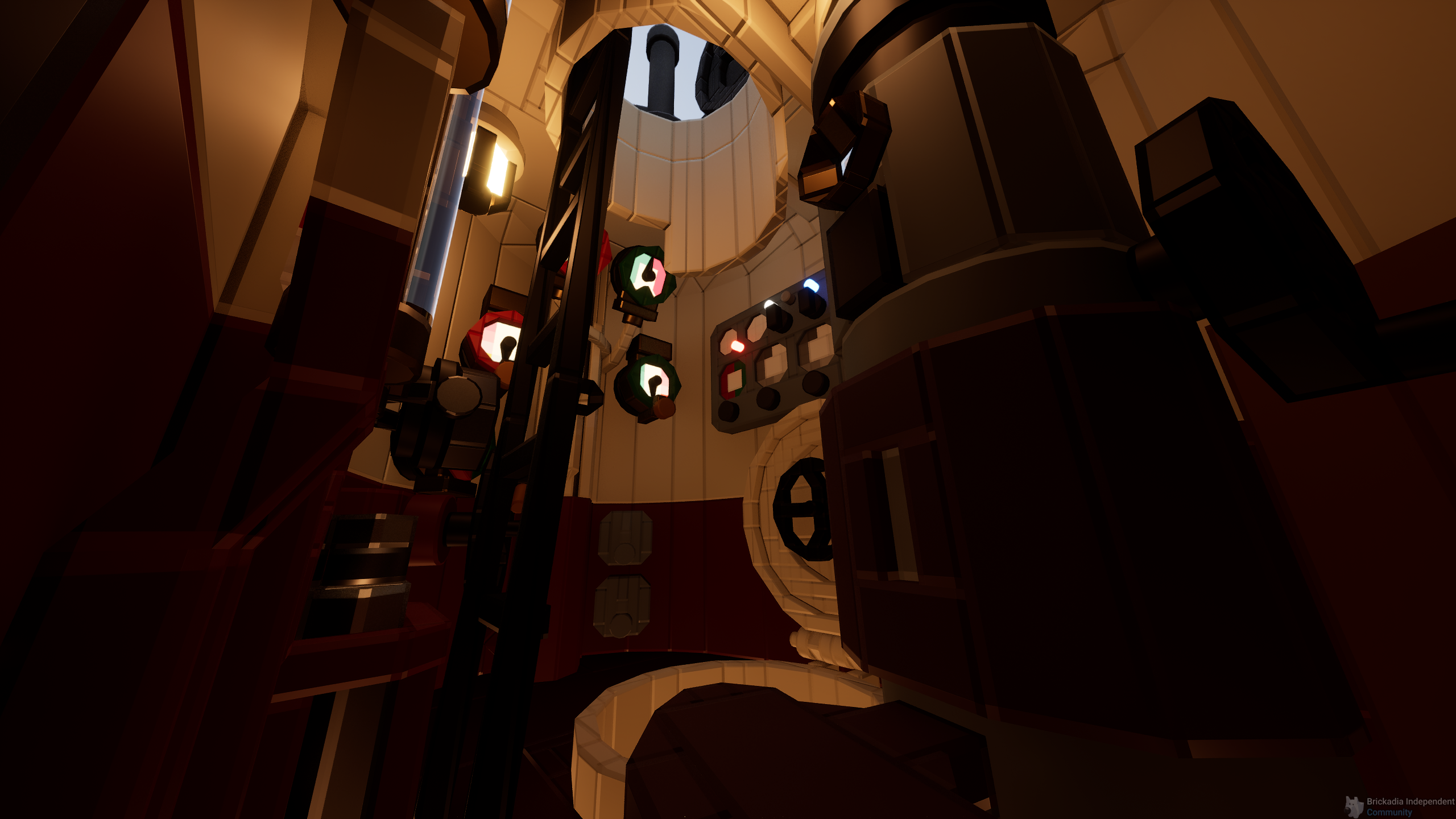
Conning tower


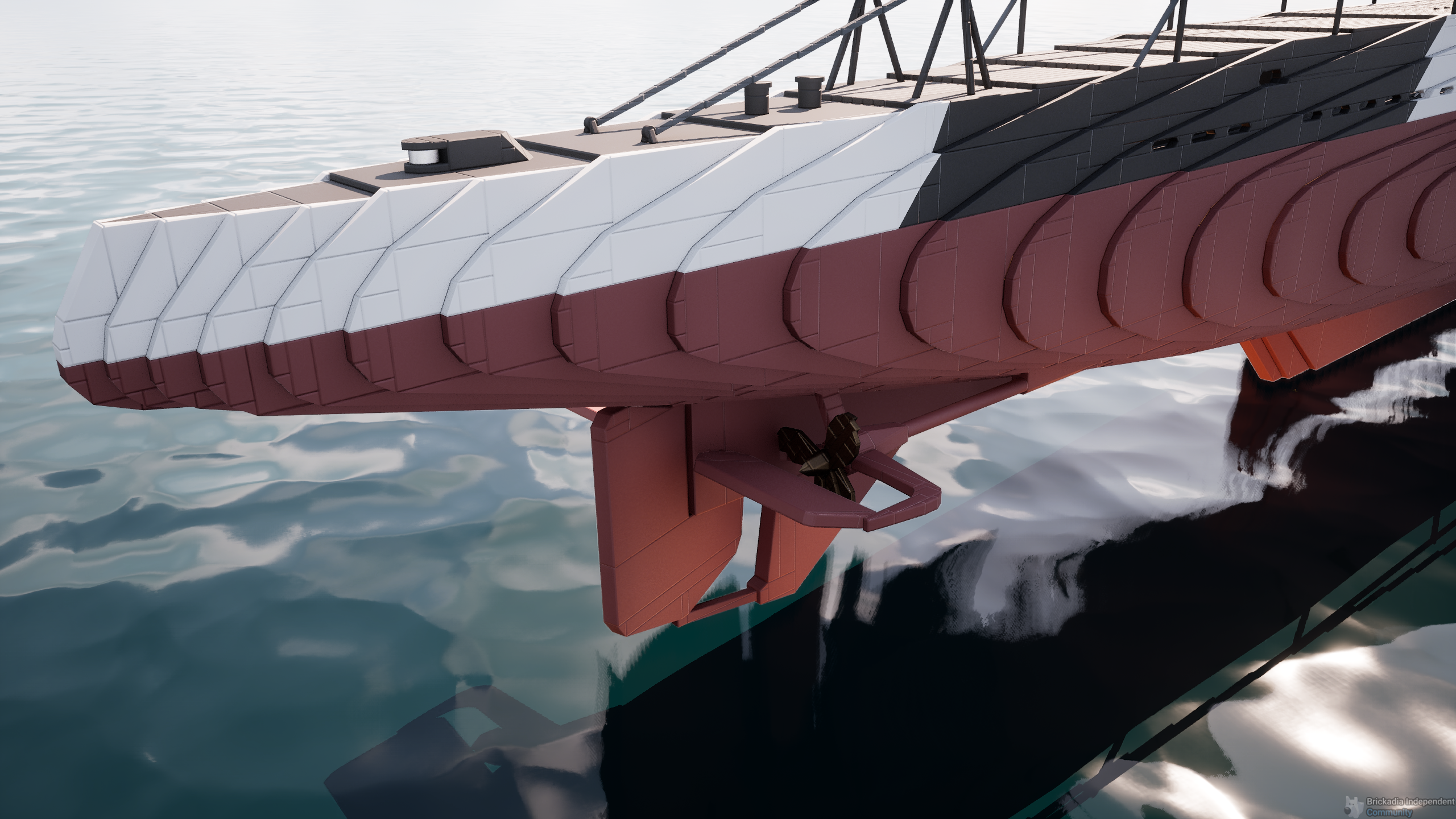
Stern with rotating rudder and aft dive planes
Diving – big round gauges are depth gauges and the red/white striped column is the Papenberg, displaying water level relative to the conning tower & periscope. To dive the boat you currently simply open the ballast tank doors to flood the tanks.
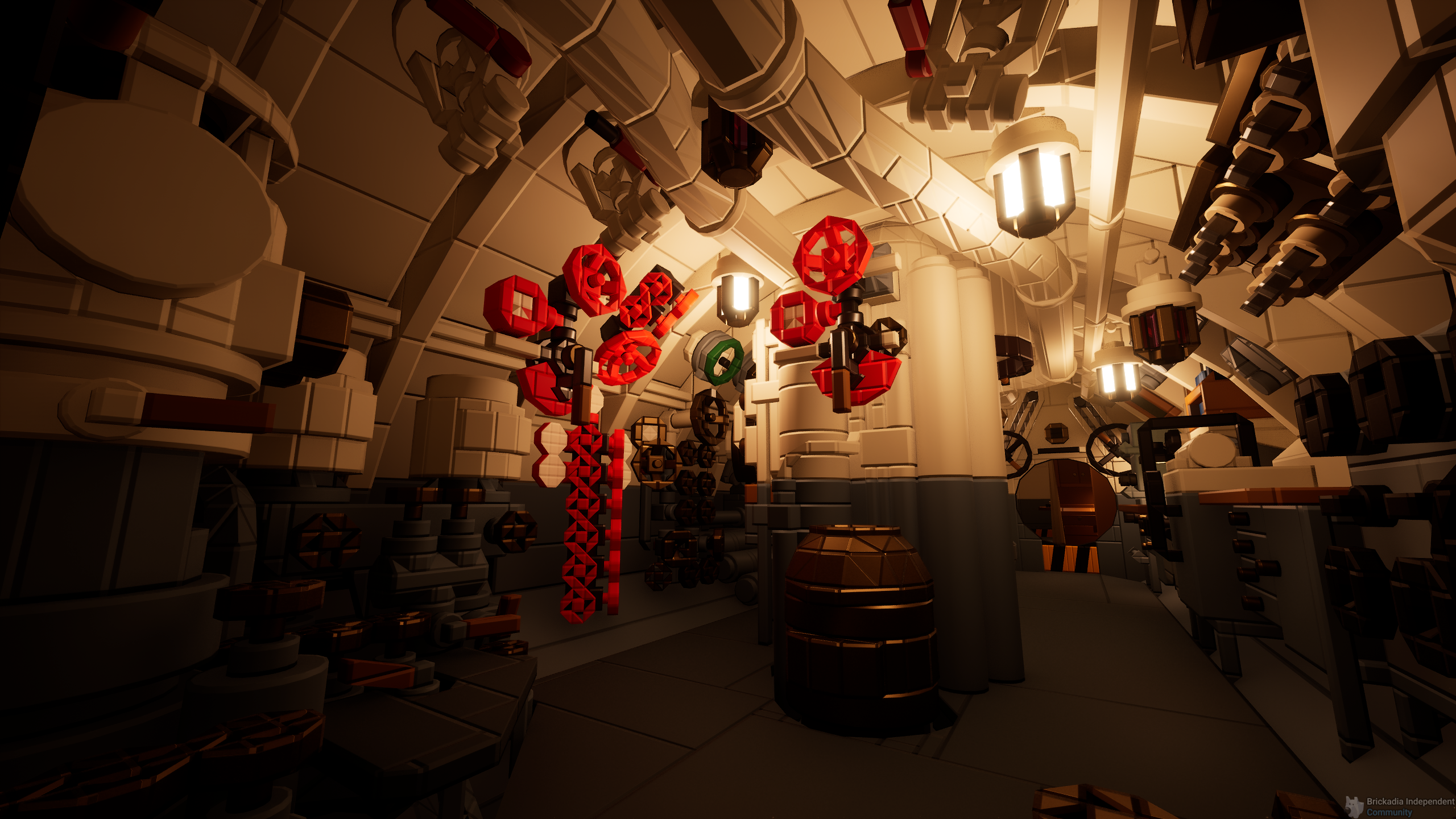
Surfacing – done by simply blowing the ballast tanks empty of water. Current system only has one valve to blow everything and the submarine practically only has one ballast tank for now, but that will change in the future as I'll work on the high pressure air system and add all appropriate main ballast, negative, regulating and trim tanks and their respective valves
Full speed surfacing as seen from the outside
Sailing on the surface
External torpedo doors, opened with cranks on the torpedo tubes
Deck gun (76mm Bofors anti air cannon)
Observation periscope & loop antenna
Attack periscope controlled with WASD